

|
个人信息Personal Information
教授 博士生导师
性别:男
学历:博士研究生毕业
学位:工学博士学位
入职时间:2010-08-20
学科:机械工程
办公地点:电子科技大学清水河校区成电国际创新中心B栋303
曾获荣誉:成都市“蓉漂”人才计划、深圳“鹏城孔雀计划”人才。
-
团队研究领域包括MEMS传感器、MEMS执行器/驱动器、微系统封装与集成、高精度检测与控制技术、芯片散热器与技术、状态监测系统方案以及设备可靠性数据分析与平台开发等。
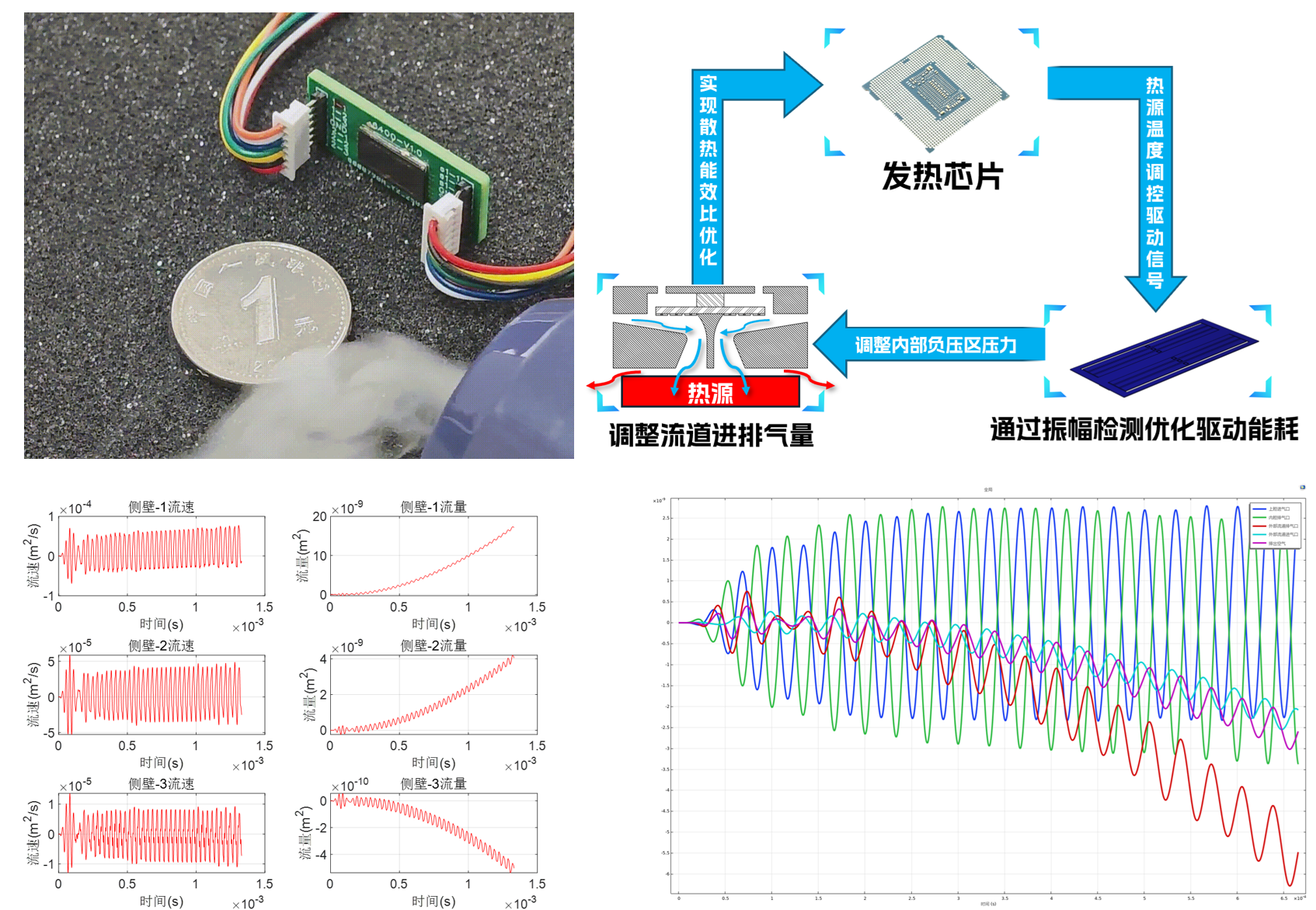
[1]面向高集成、高性能芯片的气泵式微型主动散热芯片研发(2024年–至今)
相比于传统风冷或被动散热方案,芯片级主动散热具有体积小、响应快、能效高、集成度高等优势,在智能手机、高端显卡、固态存储及国防电子等领域具有广阔应用前景。随着芯片制程微缩与算力密度提升,高发热成为制约性能释放的关键瓶颈,现有微型散热器普遍存在散热能力弱、噪音大、成本高等问题。为解决上述产业化难题,团队与企业合作,共同致力于开发基于压电薄膜谐振的硅基气泵结构、负压高效微流道以及3D堆叠集成封装技术,实现毫米级尺寸下液冷级散热性能,显著提升芯片持续高负载运行能力。
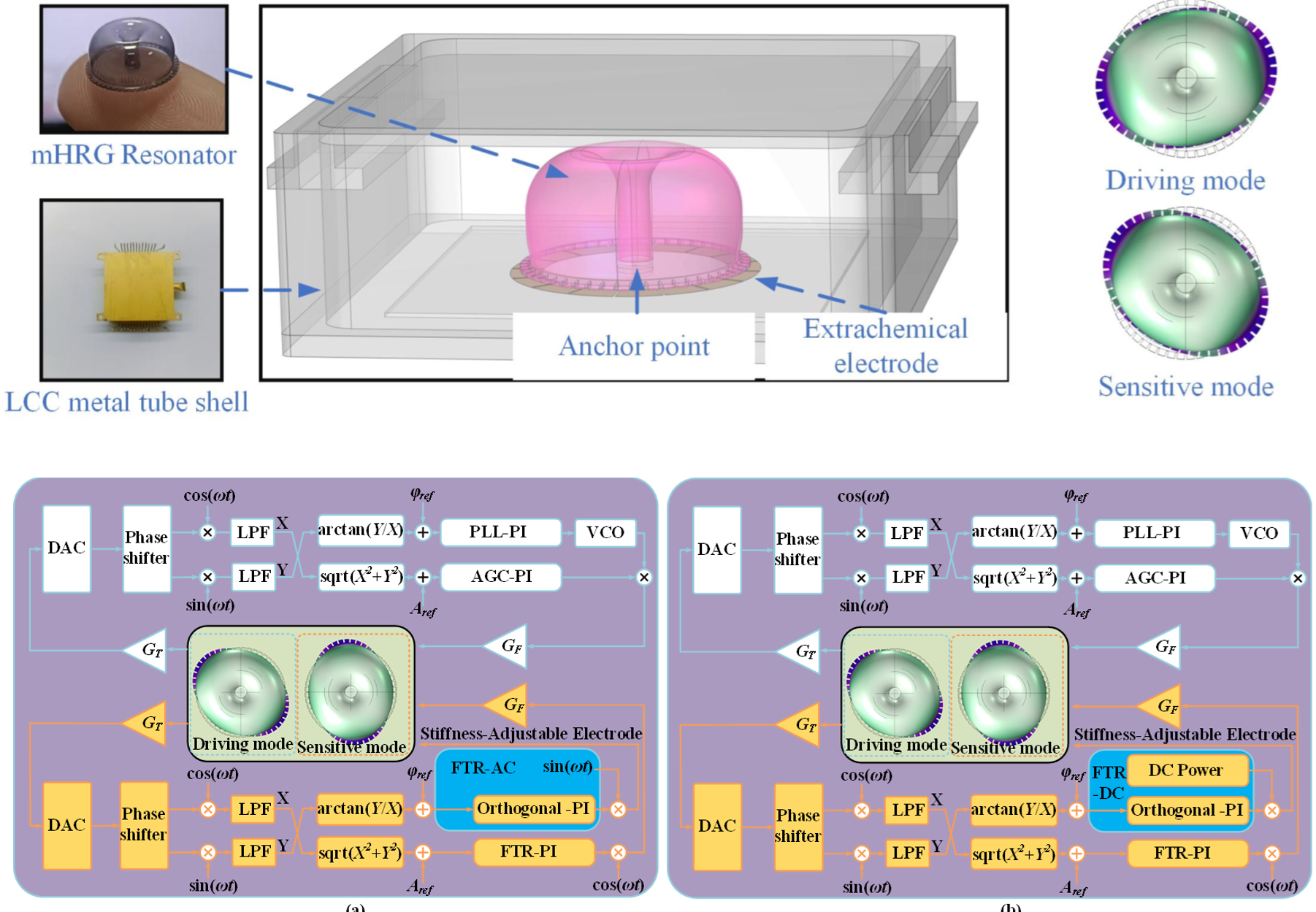
[2]面向导航级应用的MEMS谐振式微半球陀螺研究(2024年-现在)
相比于传统陀螺仪,MEMS微半球谐振陀螺具有更高的精度、更强的抗冲击能力、更小的体积和更低的功耗,在惯性导航、姿态控制、精密测量等领域具有广泛的应用前景。随着高精度导航与长期稳定性的需求提升,微半球陀螺面临振动参数原位监测困难、标度因数非线性度高、零偏不稳定性成因不明等难题。为解决以上产业化难题,团队创新性地开发了基于多尺度摄动理论的振动参数原位辨识策略,实现了谐振子机械参数长期演化的高精度监测;开发了利用系统内信号非线性协同机制的标度因数补偿算法,将非线性度降至<40ppm;建立了多噪声源、多系统参数下的零偏不稳定性解析模型,揭示了1/f噪声的调节机制,为微半球陀螺的性能优化提供了理论支撑。
[3]面向大视场、高精度应用的二维MEMS振镜研制(2021年-现在)
相比于传统微波雷达,MEMS激光雷达分辨率更高、抗干扰能力更强、体积更小且质量更轻,在障碍物检测与回避、物体识别与跟踪、同时定位与映射等领域具有广泛的应用前景。随着测量视角与检测精度的需求提升,激光雷达的核心部件-MEMS振镜面临车/机载振动失效与角度控制精度低等难题。为解决以上产业化难题,团队与华为合作,共同致力于开发振镜可靠性保护系统、镜面角度高精度检测技术(0.001。)以及振镜控制技术。



[4]高品质因数、高模态匹配压电超声波微马达及其转角检测控制技术研究(2018年-现在)
创新性提出马达定子模态匹配结构,解决了低品质因数难点, 攻克了马达装配难题,完善了马达驱动模型,解决了马达长期稳定的高精度转动检测及高精度步进控制的问题,设计了高精度微弱电容检测电路,能分辨约0.8fF的电容变化量;长期漂移稳定性优于100ppm;直流漂移重复性优于200ppm;功耗小于3W。压电微马达的控制算法研究内容包括,探究压电微马达驱动的规律性与稳定性,设计微马达步进控制算法,控制误差小于0.1°;不同姿态下的步进控制误差小于0.2°;长期重复性控制误差小于0.2°。




[5]设备可靠性数据管理、分析及建模仿真平台开发(2023年-现在)
屏蔽式闸阀退化故障机理仿真平台具备试验数据管理、可靠性建模与分析、维修性建模与分析、保障性建模与分析、经济性建模与分析、安全性建模与分析、算法发布与管理等功能,为提升阀门试验管理、设计分析效率和质量、提升阀门装备可靠性维修性保障性管理水平提供手段支持。系统包含四个功能模块:首页、工程管理、应用管理和系统管理。
序号
功能模块名称
说明
1
首页
支持查看试验项目、六性建模与分析和设备状态情况;支持在该模块快速生成报告。
2
工程管理
支持维护项目信息、设备信息、设备使用信息,获取试验数据并进行数据分析和报告生成操作
3
应用管理
支持维护产品结构树、可靠性分析与建模、维修性分析与建模、保障性分析与建模、安全性分析与建模、经济性分析与建模、可靠性评估、设备故障诊断等操作。
4
系统管理
提供用户管理、权限设置、接口配置功能;支持数据库备份和恢复功能。




[6]面向高端应用的MEMS传感器研制(2010年-2018年)
长期致力于MEMS传感器性能提升技术研究,开发高可靠性解决方案,通过结构优化、电路改进、封装优化等解决了MEMS加速度传感器的短期漂移、长期漂移及温度漂移难题。研究成果获得国家自然科学基金国家安全学术基金优秀课题、中央企业大赛二等奖;项目来源于中国工程物理研究院、自然基金青年、联合基金、面上项目、科技厅区域合作等;共培养博士3名、硕士研究生10名;发表Sensor actuat. A-phys.、JMM、仪器仪表学报、中国机械工程等论文20余篇。团队研制的MEMS加速度传感器性能指标与国际水平持平,可直接国产化替代。




- A self-adaptive piezoelectric-electromagnetic hybrid wind energy harvester with broadband operation and low startup wind speed.Mechanical Systems and Signal Processing.2026,253
- 考虑定子变形误差的超声微电机步进控制方法.仪器仪表学报,46(12):377-385
- Optical Sensor for Scanning Angle of Micromirror with Improved 2D Calibration Method.Micromachines.2025,16
- Propagation mechanism of 1/f noise in FTR system of micro hemispherical resonator gyroscopes.Mechanical Systems and Signal Processing.2025,239
- MEMS Air-Damped Isolator for Dual-Axis Micromirrors Broad-Range Frequency Vibration Isolation (JMEMS Right Now Paper).Journal of Microelectromechanical Systems.2025,34(3):260-267
- An Improved SOI-on-Glass Fabrication Method of Large-Area Sheeting of MEMS Isolator.The 18th IEEE International Conference on Nano/Micro Engineered and Molecular Systems (IEEE NEMS 2023).2023:62-65
- 微马达高精度检测电路与控制算法验证, 中国工程物理院电子工程研究所, 在岗, 与中国工程物理院电子工程研究所合作项目,平面马达转角的电容检测精度达0.01度,控制精度达0.1度。总经费169万。
- 高端航空大气压力传感器示范应用与产业化推 广, 四川省科学技术厅, 在岗, 高精度谐振式压力传感器应用推广
- 退化类阀门故障机理仿真复现工具开发, 在岗, 中国核动力研究设计院 合作项目,设备六性仿真平台开发。项目经费164万
- MEMS微镜高精度光学角度检测及控制技术研究合作项目, 华为技术有限公司, 2022/08/01-2022/09/30, 四川, 华为合作项目,实现微镜0.01度转角高精度控制,项目经费208万。
- MEMS微镜隔振衬底设计及可靠性封装技术研究技术, 华为技术有限公司, 2021/01/31-2022/01/30, 四川, 华为合作项目,护航MEMS微镜过车规,经费206万。
- 复杂微观形貌电介质的充电机理及物理模型研究, 国家自然科学基金, 2020/08/20-2024/12/31, 四川, MEMS器件漂移可靠性研究